Wpis ten dedykuje osobom, które zaczynają na poważnie przygodę z dronami FPV i mają spory mętlik w głowie odnośnie potrzebnego wyposażenia. W tym wpisie dowiesz się jakie wyposażenie jest potrzebne, by móc latać wyścigowymi dronami FPV, a także i większymi modelami.
Od tego się zaczęło…
Po wylataniu sporej liczby godzin na modelu/zabawce MJX X600 uznałem, że przyszedł czas na własnoręczną budowę drona 250.
MJX X600 – od tego modelu zaczęła się moja przygoda z kopterami…
Powód? Zabawkowy model oparty na 6 silnikach szczotkowych od firmy MJX to świetna propozycja dla osób chcących nauczyć się podstaw pilotażu wielowirnikowców i dzieci. Jednak w takich modelach nie mamy możliwości lotu bez włączonej stabilizacji, a moc silników wystarczy jedynie na wznoszenie samego modelu. Nie ma raczej mowy o dodatkach, takich jak podwieszona kamera sportowa. Uparci będą próbować, ale z własnego doświadczenia mogę powiedzieć, że nie ma to sensu. Model z ledwością będzie się unosił, a silniki po kilku takich lotach i tak będą do wymiany.
Silniki szczotkowe występujące w MJX X600
Tak się miały sprawy w roku 2016, teraz (2019 r.) na rynku jest szeroki wybór multiwirnikowców opartych na silnikach bezszczotkowych mogących służyć za modele do nauki. Przykładem są: -Seria MJX BUGS – 2/3/5; -Hubsan x4; -Eachine TRASHCAN; -Happymodel Mobula7; -itp..
No dobrze – modele dla początkujących będą opisane w innym wpisie. Przejdźmy do opisu części niezbędnych do obsługi oraz budowy pierwszego drona (niekoniecznie) klasy 250.
Decyzja podjęta – trzeba się przygotować na dobór i zakup potrzebnych części. Najpierw musimy sobie odpowiedzieć na pytanie: jaki budżet mogę przeznaczyć na zakupy? Mi akurat brakowało praktycznie wszystkiego – czyli stały punkt osób zaczynających przygodę z tym hobby. Brak ładowarki modelarskiej, aparatury, gogli FPV, baterii, itd… Nastał zatem czas na lekturę setek stron Internetu, filmów wideo na YouTube i zapoznanie się z ofertami sklepów polskich oraz chińskich.
ImaxB6 mini – jest do tej pory bardzo popularną ładowarką modelarską obsługującą m.in. baterie LiPo 1-6s.
Ładowarka modelarska IMAX B6 mini wraz z niezbędnymi akcesoriami
Jej cena w stosunku do jakości i możliwości jest bardzo dobra. Do tego posiada możliwość wgrania alternatywnego oprogramowania i własnoręcznego skalibrowania napięcia wejściowego wraz z prądem ładowania (opis już wkrótce). Do głównych ograniczeń ładowarki należy niezbyt wysoki maksymalny prąd ładowania oraz rozładowania. Max prąd ładowania dla iMax B6 mini wynosi 5A przy zachowaniu maksymalnej mocy ładowania równej 50W. Moc rozładowywania wynosi 5W.
Jeżeli nie mamy zbytnio przykręconego budżetu – możemy pokusić się o zakup aparatury z rodziny FRSKY TARANIS. W kwocie do ok. 450 zł zakupimy Taranis QX7 (recenzje QX7 znajdziesz tutaj), a za ok 650 zł FLYSKY NIRVANA. W granicach ~800zł dostaniemy natomiast FRSKY TARANIS QX7S (mamy już tutaj w standardzie m.in. gimbale Halla) oraz X9D+.
Eachine EV800 – gogle typu ,,kubełkowego”, duże i niezbyt lekkie, ale za to posiadające ekran o rozdzielczości 800×480 oraz soczewkę Fresnela powiększającą obraz. Obsługują formaty 16:9 oraz 4:3.
Gogle EACHINE EV800
Dzięki bardzo dobrej jakości wyświetlanego obrazu, dobry zasięg wbudowanego odbiornika 5.8 GHz oraz przyzwoitą cenę zyskały bardzo dużą popularność (na 2016r ok 260zł). Obecnie już mniej popularne, wyparte przez nowsze modele zawierające zintegrowany moduł diversity, jak choćby Eachine EV800D/Eachine VR D2 PRO/Eachine EV200D. Nie mogę też nie wymienić gogli innych producentów, jak FATSHARK, czy Aomway, jednak tutaj kwoty często oscylują blisko 1 tys. zł. Oczywiście nic nie stoi na przeszkodzie, by nawet dziś kupić wspomniane gogle Eachine EV800 i wyposażyć je w oddzielnie zakupiony moduł diversity np. GE-FPV RX5808 (wkrótce opiszę jak tego dokonać).
Baterie LiPo – temat rzeka. W przypadku kopterów do freestyle/wyścigów złożonych na ramach 5 cali – mamy do wyboru baterie 3s, 4s, 5s, 6s. Do tego dochodzą jeszcze pojemność baterii oraz maksymalne C (prąd w mAH) ich rozładowania. Czasy, w których królowały baterie LiPo 3s już odeszły. Początkującemu pilotowi 5-calowego wielowirnikowca będzie w prawdzie łatwiej opanować sterowanie maszyną na takich bateriach, ale… szybko okaże się, że baterie 3s nie będą w stanie dostarczyć wystarczającej energii do szybkich akrobacji. Dlatego zalecam naukę od razu na bateriach LiPo 4s. Optymalne parametry baterii dla naszego modelu-trenera to pojemność 1500mAH i wartość C wynosząca 70 (i wyżej). Czym jest parametr C? Jest to maksymalny prąd, jaki jest w stanie oddać bateria. W naszym przypadku bateria 4S o pojemności 1500mAH i ładunku 70C będzie w stanie oddać maksymalnie 105A (1500mAH * 70C=105000mAH=105A). Jaką markę baterii wybrać?
Przyszedł czas na zapoznanie się z częściami składowymi wielowirnikowców. Do niedawna (lata 2016 i niżej), by zbudować w pełni kompletny kopter FPV potrzebne były osobno: – rama (najelpiej wykonana z włókna węglowego – karbonu); – płyta dystrybucji prądu (w skrócie PDB); – kontroler lotu (w skrócie FC); – układ nanoszący aktualne dane lotu (w skrócie OSD); – 4 sztuki elektronicznych regulatorów prędkości (ESC); – 4 silniki bezszczotkowe; – odbiornik RC (w skrócie RX); – nadajnik wideo 5.8GHz (w skrócie VTX) oraz antena do niego; – kamera FPV;
Z wyżej wymienionych elementów składa się właśnie mój pierwszy zbudowany dron 250. Bardziej szczegółowe dane znajdziecie poniżej:
– rama: RCX H250 CF 3K PRO – płyta dystrybucji prądu: PDB Matek v 3.1 – kontroler lotu: SPRACINGF3 DELUXE – układ nanoszący aktualne dane lotu: Micro MinimOSD – 4 sztuki elektronicznych regulatorów prędkości (ESC): RACERSTAR Lite_S 20A – 4 silniki bezszczotkowe: RACERSTAR BR2204 2300KV – odbiornik RC: FLYSKY IA6B – nadajnik wideo 5.8GHz: EACHINE TS5828 600mW – kamera FPV: EACHINE 1000TVL CCD
Ogółem mocno budżetowe (tanie) podzespoły, ale jednak przyzwoitej jakości w stosunku do ceny. W chwili, gdy budowałem swój pierwszy kopter powyższe części były standardowo montowane w większości budżetowych, latających ,,samoróbek”.
A jak jest teraz?
Dzisiaj, by zbudować model służący docelowo do wyścigów, czy akrobacji będziemy potrzebować:
ramę – tutaj zmianom uległy kształty i wymiary. Docelowo dąży się do uzyskania niskiej wagi ramy przy równoczesnym zachowaniu dużej wytrzymałości na uderzenia. Standardem stały się ramy 210/190 do wyścigów oraz 220/240 do freestyle.
kontroler lotu – największych zmian na przestrzeni kilkunastu miesięcy doczekały się kontrolery lotu. Zamiast kupować oddzielnie FC, PDB i układ OSD – teraz możemy mieć to wszystko w ramach jednej płyty PCB. Takie kontrolery lotu określane są mianem AIO (All In One) – wszystko w jednym. Nie musimy już obawiać się o połączenie tych elementów ze sobą i plątaniną kabli połączeniowych. Dodatkowo mamy kilka gramów mniej wagi przy takim rozwiązaniu. Oprócz zintegrowanych w kontrolerze lotu PDB i OSD standardem staje się montaż również nadajników VTX i odbiorników RC. Obecnie standardem są kontrolery oparte na procesorach ARM F4, lecz przyszłość zmierza ku procesorom F7 (więcej pamięci, szybsze taktowanie, zintegrowany układ inwersji m.in dla protokołu SBUS/FPORT).
ESC – podobnie, jak w przypadku kontrolerów lotu – standardem staje się umieszczanie wszystkich ESC w ramach jednej płyty PCB. Cóż… tutaj jednak sam nie jestem optymistycznie nastawiony do tego rozwiązania. Regulatory należą do elementów, które są najbardziej narażone na spalenie. Blokada silnika po upadku, czy woda może doprowadzić nawet do trwałego uszkodzenia ESC. W przypadku ESC AIO musimy wymienić całą płytę regulatorów (zazwyczaj spore koszty). Dlatego początkującym tym bardziej polecam klasyczne rozwiązanie w postaci osobnych regulatorów dla każdego silnika. Standardem są regulatory 30-40A obsługujące cyfrowy protokół DSHOT 600. Powoli jednak są wypierane przez ESC z procesorami ARM 32-bitowymi, a więc obsługujące dodatkowo DSHOT 1200.
silniki – zmianie uległy wymiary statora, rodzaj użytych magnesów, a także rodzaj drutu nawojowego. Niegdyś stosowane były silniki o wymiarach 2204 i 2205 oraz KV z przedziału 2000-2700, tolerujące baterie 3 i 4S. Dzisiaj standard dla 5-calowców to silniki 2207/2306 2300/2500KV obsługujące napięcie baterii 3-6S. Dodatkowo mogą posiadać mocniejsze magnesy N52 ARC (niektóre wersje dodatkowo mogą je mieć zakrzywione), odkryte spody statora oraz drążony wał. A wszystko po to, by osiągnąć możliwie największą moc przy stosunkowo niewielkich wymiarach i wadze.
odbiornik RC – zmianom uległy tutaj wymiary oraz waga gotowego odbiornika RC. Z wagi przekraczającej często 15g udało się zejść do 5, a nawet 3 gramów. Do wyboru teraz mamy także moduły tzw. ,,dalekiego zasięgu” wraz odbiornikami (pasmo 900MHz).
Moduł nadawczy dalekiego zasięgu FRSKY R9M wraz z odbiornikiem R9MM
nadajnik VTX – jeszcze do niedawna wybór nadajnika wizji ograniczał się do dobrania odpowiedniej mocy emitowania sygnału, liczby obsługiwanych kanałów i częstotliwości, właściwego gniazda antenowego oraz wymiarów (i ew. wagi). Dzisiaj (rok 2019) mamy dodatkowo nadajniki VTX posiadające obsługę SmartAudio (zmiana ustawień nadajnika z poziomu kontrolera lotu), lżejsze i mniejsze gniazda antenowe (MMCX, lub IPEX U.FL), a także szersze spektrum mocy nadawczych (nawet do 1000mW). Coraz częściej wymagają również zasilania napięciem max do 5V.
kamera FPV – tutaj także możemy dostać bólu głowy od mnogości firm, modeli i rozwiązań. Na szczęście cały czas głównymi różnicami wśród kamer fpv są: -rodzaj zastosowanej matrycy (CMOS, bądź CCD); -format obrazu (PAL/ NTSC); -skala obrazu (16:9 /4:3); -rozmiar soczewki (2.8/2.5/2.3/2.1/1.9); -napięcie zasilania; -posiadanie, lub brak mikrofonu; -posiadanie, lub brak nakładki OSD.
Wśród kamer FPV mamy również do wyboru urządzenia, które jednocześnie służą jako standardowa kamera pokładowa i kamera nagrywająca w jakości HD. W ich przypadku stosowane są matryce CMOS. Przykładem takich kamer są: –RunCam Split; –Caddx Turtle; –Foxeer Mix.
Matryca CCD vs CMOS:
Odwiecznym problemem pilotów FPV jest wybór matrycy w kamerze pokładowej. Przetworniki CCD są praktycznie odporne na wibracje, jak również szybko reagują na zmiany warunków oświetlenia. Przelatując zatem z miejsca bardzo dobrze oświetlonego do ciemniejszego i odwrotnie będziemy mieć cały czas czytelny i aktualny obraz, pozbawiony tzw. efektu jello. Jednak wybierając matrycę CCD musimy się liczyć z tym, że obraz nie będzie zupełnie ,,jak z widokówki” – będzie pozbawiony wielu detali w dalszym kadrze. Zupełnym przeciwieństwem są przetworniki CMOS – w tym przypadku obraz będzie bardzo przyjemny dla oka, z bardzo dobrym odwzorowaniem barw i detali krajobrazu. Minusem oczywiście tego typu matryc jest podatność na wibracje (obraz staje się niewyraźny, przypomina trzęsącą się galaretkę – efekt jello) oraz wolna zmiana kontrastu przy dynamicznie zmieniających się warunkach oświetlenia kadru. Na szczęście producenci kamer FPV starają się zredukować, a nawet wyeliminować niedogodności CMOS zbliżając się do właściwości przetworników CCD.
śmigła – ostatni potrzebny element. Tutaj zmiany nie zachodzą tak gwałtownie na przestrzeni nawet kilku lat. Niegdyś stosowano w większości budowli kopterów śmigła dwupłatowe. Obecnie w wielowirnikowcach do freestyle i wyścigów montuje się 3-płatowe. Dodatkowa łopatka sprawia, że śmigło podczas pracy wytwarza większy strumień powietrza. Poprawia się także reakcja modelu na ruchy drążków oraz zwiększa precyzja sterowania. Dodatkowo śmigła 3 i więcej płatowe wykazują mniejszą tendencję do wibracji w stosunku do dwupłatowych. Niestety wszystko to jest kosztem większego poboru energii modelu z takimi śmigłami. Oznaczenia śmigieł zazwyczaj zapisane w postaci: 5Xx4Xx3 – gdzie: 5X oznacza długość śmigła w calach (tutaj 5 cali), 4X to kąt nachylenia łopat ( tutaj 40), 3 to liczba łopat (3 łopatki). Im większy kąt natarcia łopatek – tym śmigło wytwarza większy ciąg, ale także zwiększa pobór prądu silników.
Po zakupie wybranych przez nas części nastał czas na ich właściwe umieszczenie w ramie i ew. polutowanie.
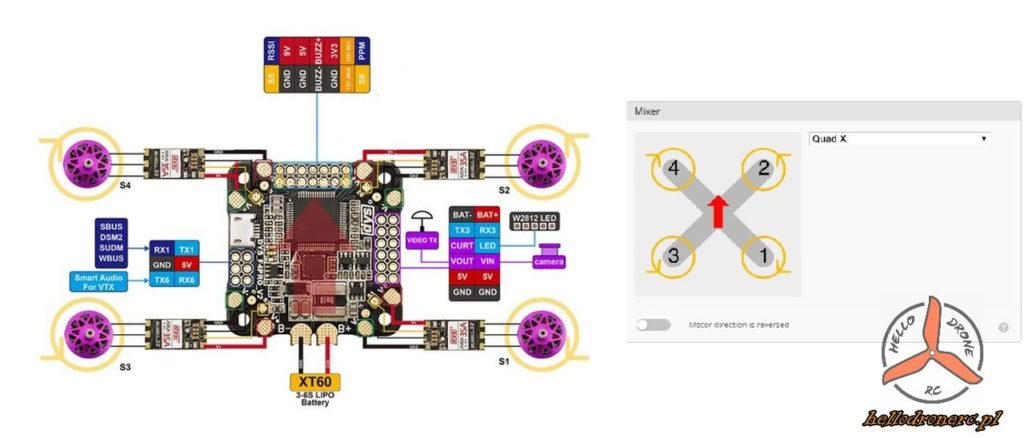
Zależność poszczególnych elementów najlepiej przedstawia poniżej załączony schemat:
Schemat połączeń elektroniki drona w oparciu o kontroler lotu DYS F4 PRO V2.
Sposób połączenia ze sobą części składowych może nieznacznie się różnić w zależności od posiadanych przez nas części. Całym sercem modelu wielowirnikowca jest kontroler lotu. Do niego następnie przyłączane są w wyznaczone przez producenta miejsca: kable sygnałowe ESC, zasilanie i kable sygnałowe z kamery FPV oraz nadajnika wideo, a także odbiornik RC. Nie może oczywiście zabraknąć zasilania – te najcześciej jest doprowadzane za pośrednictwem kabla AWG14 z wtyczką XT60. Prawdę mówiąc, własnoręczne składanie ,,drona wyścigowego” może na początku siać przerażenie, ale tutaj nie ma czego się bać 😉 Jeżeli lutowanie lutownicą nie sprawia Wam zbytnich trudności – tym bardziej nie ma powodu do obaw.
Złożony i gotowy dron klasy 250
Wszelkie prace przy naszym nowym modelu zalecam robić spokojnie, bez pośpiechu. Lepiej niech zajmie to nam kilka dodatkowych minut, niż później mamy się złościć, że coś źle (bo na szybko) zrobiliśmy.