Tryby lotu występujące w zakładce Modes Betaflight
Najczęściej wybierane
Poniżej znajdziecie najczęściej wybierane tryby lotu w Betaflight. Opisane według kolejności występującej w programie Betaflight Configurator:
ARM – odpowiada za uzbrojenie silników;
Angle – tryb oparty na odczytach z żyroskopu zapewniający autopoziomowanie modelu po puszczeniu drążków osi pitch, czy roll;
Horizon – jak wyżej z różnicą, że tutaj pełne wychylenie drążka osi pitch, bądź roll spowoduje wykonanie beczki w powietrzu. Podobny do Acro, lecz posiada dodatkowo autopoziomowanie modelu po puszczeniu drążków;
Failsafe – zainicjowanie trybu failsafe z przełącznika aparatury. Wykorzystywane najczęściej w celach testu, jak model się zachowa po utracie sygnału RC;
GPS Rescue – opcja używana awaryjnie, służąca do powrotu modelu w pobliże miejsca startu. Wymaga modułu GPS;
BEEPER – aktywowanie buzzera;
OSD DISABLE SW – pozwala na blokadę wyświetlania OSD na ekranie FPV z oprogramowania Betaflight. Przydatne, gdy nasza kamera FPV posiada wbudowane OSD;
BLACKBOX – aktywuje zapis logów wszystkich parametrów pracy FC na wbudowany chip, bądź kartę pamięci;
AIR MODE – aktywuje pracę silników przy zerowym gazie, przy jednoczesnym przetwarzaniu PID i dynamicznym filtrowaniu.
FLIP OVER AFTER CRASH – aktywowanie trybu przywracającego nasz model po upadku do góry nogami do właściwej pozycji, umożliwiającej dalszy lot. Oczywiście o ile pozwolą na to śmigła oraz silniki (tj. jeżeli nie doznały większych obrażeń po upadku);
VTX PIT MODE –przełącza nadjnik wideo w tryb PIT Mode (bardzo niskiej mocy nadawczej, np 0.1mW, bądź całkowicie go wyłącza). Wymaga nadajnika obsługującego komunikację SMARTPORT;
Rzadziej wykorzystywane
Posegregowane alfabetycznie:
ACRO TRAINER – działa podobnie, jak tryb HORIZON – tylko że tutaj możemy zablokować maksymalny kąt pochylenia modelu – wymaga aktywnego akcelerometru?;
BEEP GPS SATELLITE COUNT – buzzer zapika tyle razy, ile dostepnych jest satelit – wymaga modułu GPS;
BLACKBOX ERASE (>30S) – wymazywanie logów z blackbox dłuższych niż 30s?;
FPV ANGLE MIX – podczas obrotów w osi Roll model będzie dodatkowo pochylony o kąt wpisany w zakładce Configuration, sekcji Camera. Ma na celu umożliwiewnie robienia płytkich ,,beczek” wokół osi obiektywu kamery FPV;
Headfree – bardzo rzadko używany, najczęściej przez początkujących. Niezależnie, jak usytuowany jest model (którą stroną) w stosunku do pilota – sterowanie w przód zawsze będzie skutkowało lotem modelu do przodu. Tak samo do tyłu i w pozostałe kierunki. Przydatne dla początkujących pilotów, którzy mają na początku problemy ze sterowaniem modelu w różnych orientacjach do siebie;
LAUNCH CONTROL – system wspomagania startu wyścigu, który pozwala pilotowi pochylić model do przodu, a następnie zwolnić drążki z aparatury. Pozycja quadacoptera będzie cały czas taka sama, mimo puszczernia drążków.
PARALYZE – unieruchomi nasz model i nie pozwoli mu się ponownie uzbroić – wymagane wypięcie i wpięcie baterii, dla ponownego uzbrojenia. Wykorzystywane naczęściej przez pilotów dronów wyścigowych;
PREARM – dodatkowe, dwuetapowe zabezpieczenie do uzbrajania modelu. Jeżeli je aktywujemy – by uzbroić model będziemy musieli mieć na raz aktywne dwa przełączniki w aparaturze (tryby)- ARM oraz PREARM;
Lista będzie aktualizowana wraz z pojawiającymi się nowymi trybami lotu.
Wybór trybów lotu
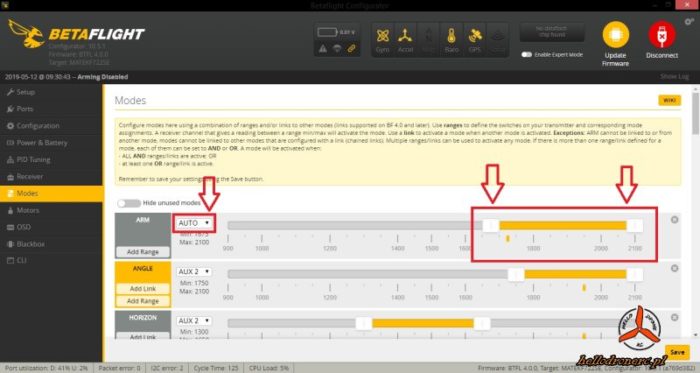
Aby wybrać/ustawić interesujący nas tryb – wystarczy kliknąć Add Range przy wybranym trybie:
Następnie (oczywiście przy włączonej aparaturze i zbindowanym odbiorniku RC) możemy zmienić pozycję wybranego przełącznika w aparaturze. Betaflight Configurator powinien sam wykryć kanał przełącznika i pokazać wykrytą pozycję w postaci żółtej ,,pastylki”:
Teraz pozostało nam przestawić suwak (żółty pasek) obrazujący zakres
obowiązującego trybu do wartości kanału do żółtej ,,pastylki”.
Postępujemy tak ze wszystkimi interesującymi nas trybami lotów. By zapisać ustawienia – musimy kliknąć przycisk Save.